SafeLand: Safe Autonomous Landing in Unknown Environments with Bayesian Semantic Mapping
Unmute the video to listen to a 1 minute summary.
Abstract
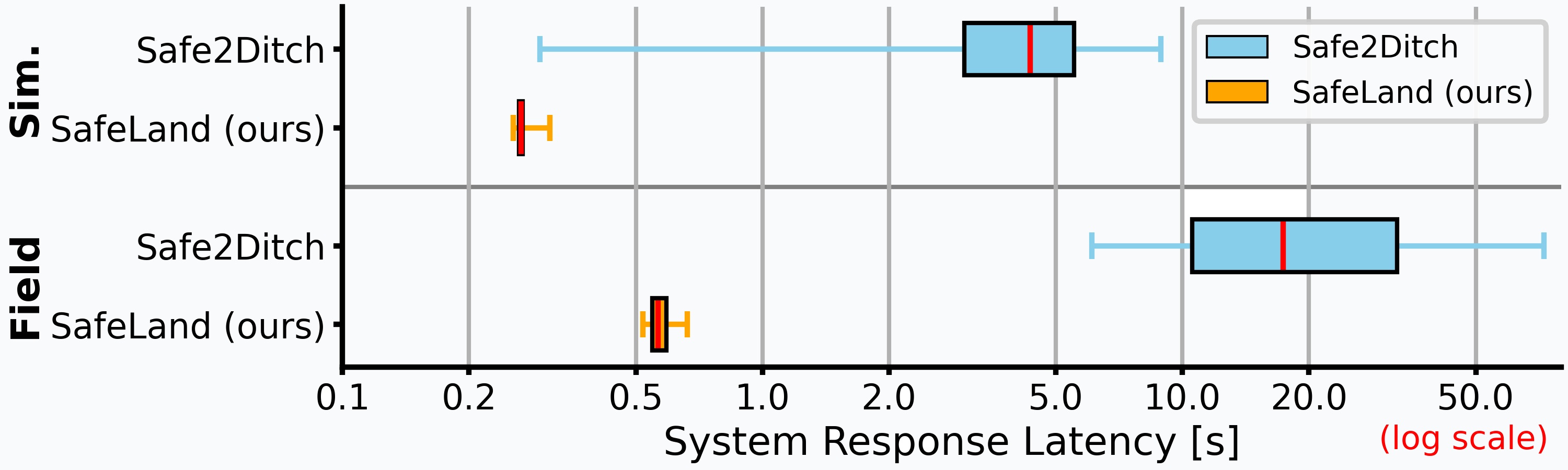
Autonomous landing of uncrewed aerial vehicles (UAVs) in unknown, dynamic environments poses significant safety challenges, particularly near people and infrastructure, as UAVs transition to routine urban and rural operations. Existing methods often rely on prior maps, heavy sensors like LiDAR, static markers, or fail to handle non-cooperative dynamic obstacles like humans, limiting generalization and real-time performance. To address these challenges, we introduce SafeLand, a lean, vision-based system for safe autonomous landing (SAL) that requires no prior information and operates only with a camera and a lightweight height sensor. Our approach constructs an online semantic ground map via deep learning-based semantic segmentation, optimized for embedded deployment and trained on a consolidation of seven curated public aerial datasets (achieving 70.22% mIoU across 20 classes), which is further refined through Bayesian probabilistic filtering with temporal semantic decay to robustly identify metric-scale landing spots. A behavior tree then governs adaptive landing, iteratively validates the spot, and reacts in real time to dynamic obstacles by pausing, climbing, or rerouting to alternative spots, maximizing human safety. We extensively evaluate our method in 200 simulations and 60 end-to-end field tests across industrial, urban, and rural environments at altitudes up to 100m, demonstrating zero false negatives for human detection. Compared to the state of the art, SafeLand achieves sub-second response latency, substantially lower than previous methods, while maintaining a superior success rate of 95%. To facilitate further research in aerial robotics, we release SafeLand's segmentation model as a plug-and-play ROS package, available at https://github.com/markus-42/safeland.
Overview
🆘 Challenges
- Autonomous landing in unknown environments requires reliable perception without prior knowledge
- UAVs are typically constrained to lightweight, low-cost sensors despite the need for rich environmental understanding
- Dynamic obstacles such as humans introduce additional safety-critical uncertainty
- Existing approaches rely on prior maps, prepared landing zones, or heavy sensing, limiting real-world deployment
💡 Our Approach
- Safeland provides a vision-based system using onboard RGB input and height estimation
- Online construction of a metric, semantic ground map enables safe operation in previously unseen environments
- Temporal Bayesian filtering ensures robustness to noise and changing observations
- Adaptive decision-making enables safe and real-time reaction during landing
Method

- Semantic Scene Understanding: A lightweight aerial segmentation network predicts pixel-wise semantic classes from RGB images, distinguishing safe and unsafe landing regions.
- Metric Ground Projection: The semantic predictions are projected onto a metric ground plane using height measurements to resolve scale ambiguity.
- Bayesian Semantic Mapping: Observations are fused over time into a probabilistic map, incorporating temporal filtering and semantic decay to handle noise and dynamic changes.
- Landing Site Selection: Candidate landing areas are identified based on safety, size constraints, and temporal consistency within the map.
- Adaptive Landing Strategy: A behavior tree continuously evaluates the selected landing site and dynamically reacts to environmental changes during descent.
Experiments

⚙️ Setup
- 200 simulations
- 60 end-to-end field tests
- Urban, industrial and rural environments
- Altitudes up to 100m
- Deliberate human interference to test safety
✅ Results
- 95% landing success rate
- Sub-second reaction time
- Robust across diverse environments
- Safe for humans and property
- Outperforms state-of-the-art methods
SafeLand in Comparison
SafeLand advances beyond existing and state-of-the-art UAV landing approaches by unifying real-time semantic understanding, probabilistic mapping, and adaptive decision-making within a lightweight system. In contrast to methods that depend on prior maps, dedicated landing zones, or heavy sensing such as LiDAR, SafeLand operates using only an onboard RGB camera and a height sensor while constructing an online semantic ground map of previously unseen environments. Its Bayesian temporal filtering with semantic decay ensures robustness against noise and dynamic changes, while an adaptive behavior tree enables safe and reactive landing in the presence of moving obstacles, including humans. This combination yields a solution that is not only more scalable and deployable, but also demonstrably more reliable and safety-aware, as evidenced by extensive real-world validation and consistently safe human interaction without missed detections.
BibTeX
@misc{gross2026safeland,
title={SafeLand: Safe Autonomous Landing in Unknown Environments with Bayesian Semantic Mapping},
author={Markus Gross and Andreas Greiner and Sai Bharadhwaj Matha and Felix Soest and Daniel Cremers and Henri Meeß},
year={2026},
eprint={2603.17430},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2603.17430},
}